Data Mining
John Samuel
CPE Lyon
Year: 2019-2020
Email: john(dot)samuel(at)cpe(dot)fr

John Samuel
CPE Lyon
Year: 2019-2020
Email: john(dot)samuel(at)cpe(dot)fr







.jpg)

.png)


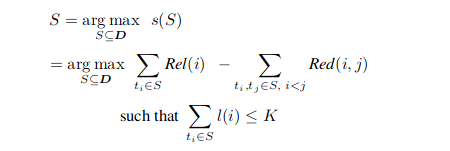
Let
Then